Welcome (back) to the Robots 101 series! This time, we’re addressing theming your robot.
Theming your robot might not seem important at first, but having consistency between your robot, your team and social media goes a long way to delivering a strong message that your team is fully committed to the competition. Plus, those who may want to get involved in the team, but don’t want to build or code, still have an opportunity to leave a mark on your robot. Having a solid design for the outside of your robot before starting the rest of the process may even help your decision on how to tackle the event!
Step one is the planning phase. Get your team together to discuss general titles for your theme. Whether it’s cyberpunk or gothic, nothing should be written off immediately in this process. Give everyone the chance to share their ideas before deciding on a few “final” ideas. At this point, you could start finding images that visualise your theme and begin collating them. You may find the most popular theme may not work at this point - and that’s ok!
Next, you could try and create some concepts of how your robot and team mates would look at the competition. This is done best when each visualisation is unique, so that merging parts of each design together to create a final product is easier down the line. You could try using materials that your team already has on hand to make a prototype shell of your robot, or using basic wardrobe items to block out clothing choices.
Remember, your team’s theme will likely develop throughout the building process as you come up with new ways to tackle the competition. Let this happen! Being rigid in your design process will almost certainly cause issues later down the line. By the time your team gets to the final competition you’ll have a unique style to your robot, your competitors and your socials.
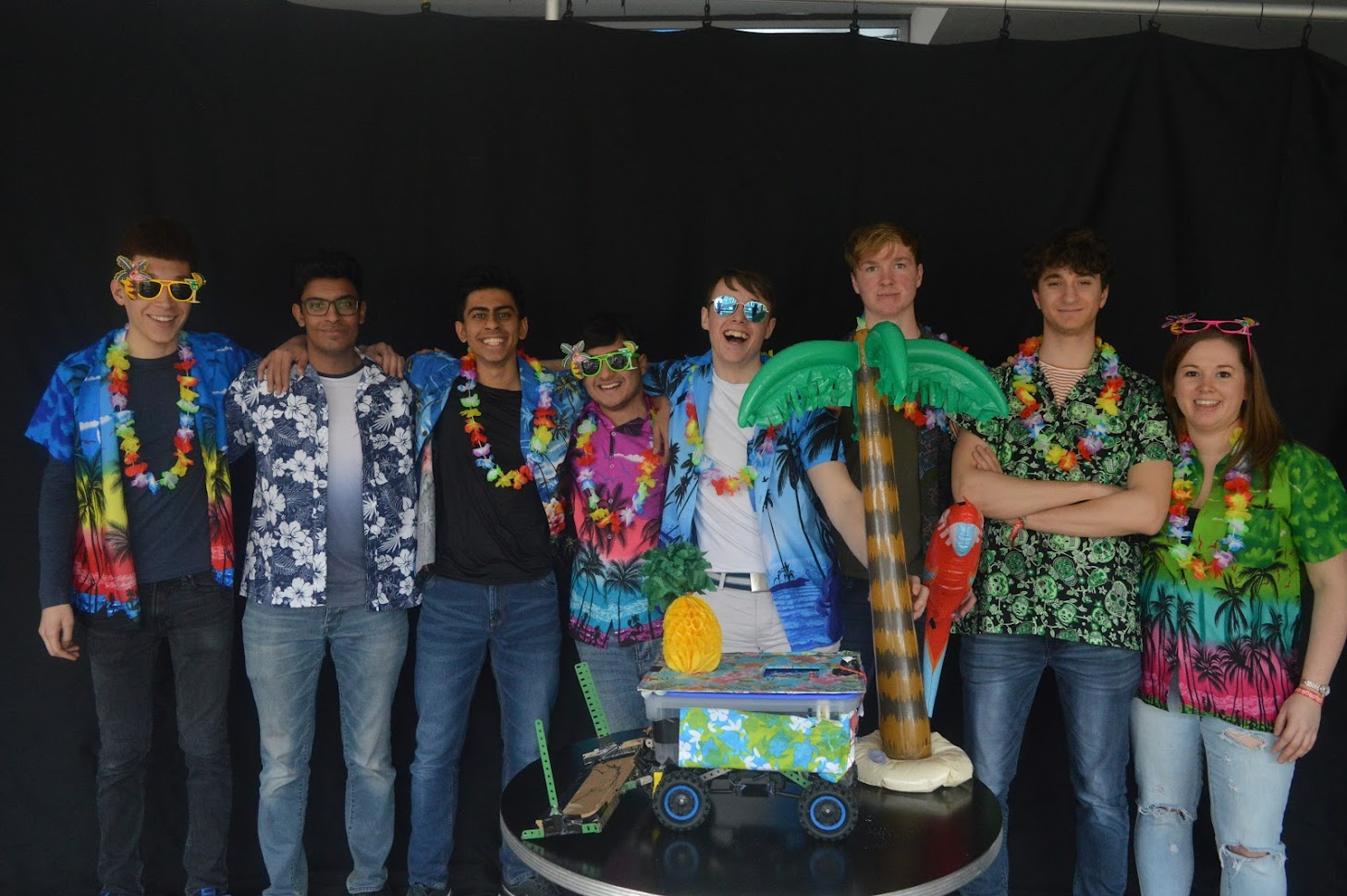
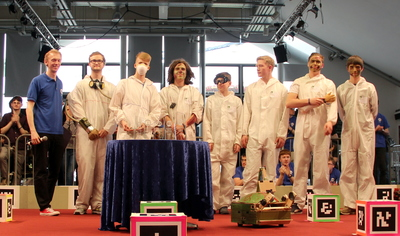
To give you some ideas, we’ve included some photos of teams we think did particularly well at previous competitions.