The Highfield School took first place in Student Robotics 2025, defeating fellow rookies from the School of St Helen and St Katharine and returning competitors Ruthin School and Royal Grammar School Guildford in a nail biting grand final after two days of exciting competition.
The game: Urban Heights
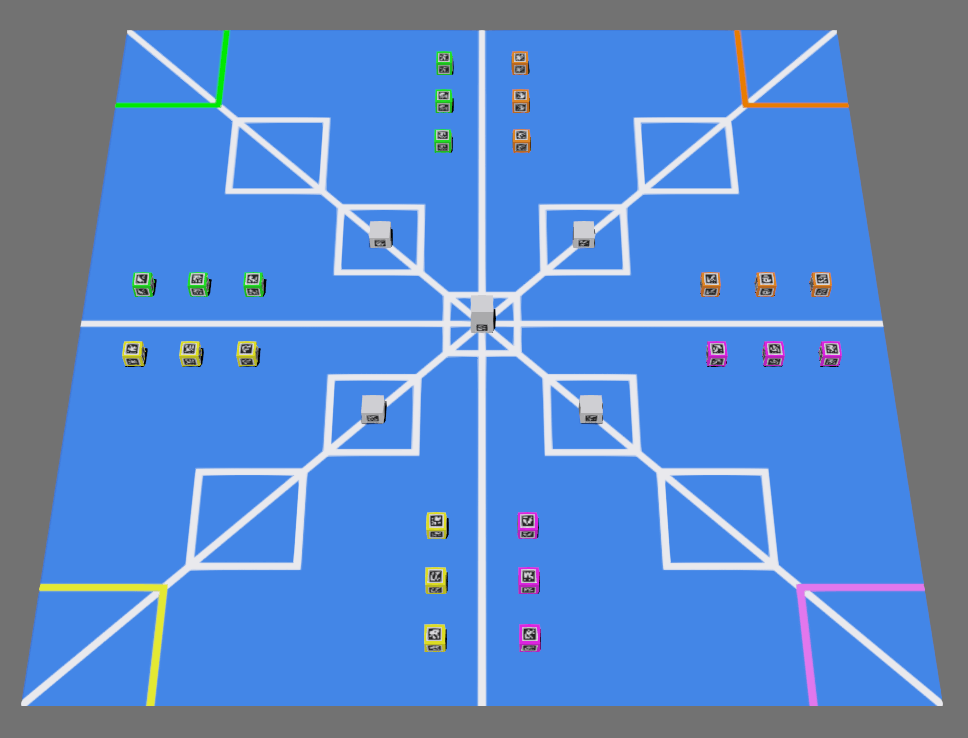
This year’s game, Urban Heights, employed teams to shape their city’s skyline by delivering vital pallets of building materials to designated districts. Additionally, teams could dive into constructing multi-story marvels for bonus points, by stacking their pallets on top of each other with the aim of being the tallest stack in the district.
The game was open to a huge range of strategies, from delivering a mass of pallets to a single area, to forming stacks of three in the central district, knocking down opposing team pallets, and guarding your own structures.
Challenges
This year’s competition offered teams a set of Challenges to be completed throughout the competition year. These encouraged teams to start work on their robots early and covered movement, mechanics, and sensing - three core pillars to creating a successful robot. The Challenges could be approached in any order, and completing challenges before certain deadlines earned the teams bonus league points which could make all the difference come the competition.
Virtual League
The first part of our competition this year was a virtual league, broadcast live in February. Across twenty-three matches, teams competed in a simulated version of the main competition, testing their coding skills against one another.
By the end, including the league points accrued from the Challenges, King Edward VI Grammar School were topping the leaderboard, with Queen Mary’s College and Abingdon School in joint 2nd, just 3 points behind.
League Matches
This year there were 50 in person league matches on Saturday and Sunday, giving teams the chance to refine their strategies and perfect their implementation in software.
By the end of the league stage The Highfield School led by just three points over the School of St Helen and St Katharine, with King Edward VI Grammar School and Royal Grammar School Guildford close behind.
Knockouts
This year the knockout stage was Double Elimination, meaning that teams needed to lose two matches to be knocked out of the competition. With each round, the competition grew fiercer, and the robots were pushed to their limits as they raced to deliver their pallets and secure their place in the finals. The extra chance before being eliminated resulted in some thrilling matches, with Ruthin School recovering from finishing 23rd in the league and running all the way to the grand final.
The Final
After the gruelling weekend of competition, the final four teams were dialled in with consistent but varied strategies. The excitement was only amplified by the fact that two of our finalists were rookie teams, who had never competed in Student Robotics before!
In a devastating start to the match Royal Grammar School Guildford tried some new code which unfortunately crashed immediately. The Highfield School pursued their usual method by gathering a large number of pallets in their middle district, then heading for the central high rise to deposit a token. Meanwhile, the School of St Helen and St Katharine went for stacks in each district of their quadrant, again finishing with a dive to the centre. Ruthin School missed a pallet but got to the centre first, aiming to deposit a stack and defend the area, but clipped the edge of the high rise and flipped onto their back. The fallen robot blocked The Highfield School and the School of St Helen and St Katharine managed to sneak in and drop a pallet on top with just four seconds remaining.
After a tense wait for the scores, The Highfield School had won by just two points!
Results
- Winner: THS — The Highfield School
- 2nd place: SHK — The School of St Helen and St Katharine
- 3rd place: RTS — Ruthin School (award sponsored by University of Southampton Electronics and Computer Science department)
- Excellence in Engineering: QMC — Queen Mary’s College (award sponsored by UK Electronic Skills Foundation)
- Rookie Award: THS — The Highfield School
- Robot and Team Image: SHK — The School of St Helen and St Katharine (award sponsored by IT Dev)
- Online Presence: SHK — The School of St Helen and St Katharine
The Excellence in Engineering Award is given to the team that displays the most extraordinary ingenuity in the design of their robot. As engineers, we appreciate elegance, simplicity, and robust engineering. Whilst the Judges were impressed by the advanced architecture of The Highfield School’s robot, and innovative lifting mechanism of King Edward VI School, This year the Excellence in Engineering award was given to Queen Mary’s College. Their robot sported precise movement, innovative design, and a column stack mechanism which allowed them to precisely stack pallets to ensure theirs were the highest.
We’re always delighted to welcome new teams to Student Robotics and understand how big a challenge it can be without prior experience. To recognise this additional challenge, we award the Rookie Award to the highest placed newcomer in the league, celebrating their incredible achievement. This year’s recipient was The Highfield School, who ended up topping both our League table and Knockouts!

We award the Robot and Team Image Award to the team that presents themselves in the most outstanding way. As usual our teams rose to the challenge and we saw some fantastic themes! We loved The College of Richard Collyer’s turtle theme, which included competitors in face-paint, however the award for Robot and Team Image went to The School of St Helen and St Katharine for their Alice in Wonderland themed robot. The robot was decorated with roses, playing cards, and even a looking glass, with team members all in fancy dress to match.
Through social media, teams can share the problems they’re facing as well as their designs and successes. A few teams stood out to us this year with their regular uploads, such as The College of Richard Collyer and The Ladies College from Guernsey, but the winner of the Online Presence Award was The School of St Helen and St Katharine for consistent and high quality posts throughout the year.
Check out the rulebook for all the details on the awards we give.
Media
If you would like to watch the competition back, the event was livestreams are available on our YouTube Channel:
- Saturday, Day 1: https://youtu.be/iJwuYluRUjE
- Sunday, Day 2: https://youtu.be/m4DT0_MfAuk
The playlists for the soundtrack to the competition are also available:
Photos of the event have been added to our Google Photos Album.
Thank You
This year’s competition would not have been possible without all of our amazing sponsors. Their generous support allows us to make Student Robotics free to enter and help us continue in our mission to bring the excitement of engineering and the challenge of coding to young people through robotics.
Our SR2025 Sponsors
- The University of Southampton Engineering and Computer Science
- UK Electronics Skills Foundation
- Adventurous Machines
- ITDev
- Mythic Beasts
- Hexibox
We’re always looking to partner with more organisations. If you’d like to work with us, see our sponsor page.
Our Volunteers
We’d also like to thank our volunteers, who make Student Robotics happen every year! Some have helped at the competition itself, while others have been in teams working throughout the year to organise the event. Our Competition Team designs, organises, and delivers Tech Days and the Competition weekend. Our Kit Team designs and supports the software and hardware our competitors use; the Infrastructure Team ensures that our website stays up and our internal teams can work collaboratively; the Fundraising Team ensures that we have the resources needed to run our events; and the Marketing Team makes sure our efforts are seen and heard by all. A huge thank you to everyone who contributed to the success of this year’s competition.
If you’re reading this and want to join us next year, sign up on our volunteering page.
Notes to editors
Student Robotics is an annual robotics competition for 16-19 year-olds in the UK and Europe. It was founded in 2006 by university students and is free to enter thanks to our sponsors and many volunteers. Since it was first run in 2008, the final competition has grown from one room at the University of Southampton1 to the UK’s biggest autonomous robotics competition.
At the start of the academic year, teams are given a kit containing custom-made electronics at a Kickstart event, where the game for the year is announced. They then have until the Easter holiday to build fully-autonomous robots, which will compete against each other in the final competition. They are supported by volunteer mentors, and software to assist them in programming their robots is provided.
If you would like to find out more, please get in touch.
The SR Team
-
Student Robotics is independent from the University of Southampton. ↩