Our Kit team has been hard at work and are delighted to announce the release of the Kit Software version 2023.1.0 🎉. The full changelog for this release is on the updates page but we wanted to highlight a few of the notable improvements!
Remote Debugging
If there’s one piece of advice we give to our teams it’s “Test, Test, Test” and with Remote Debugging we hope to make this even easier!
Using VS Code (or any editor that supports DAP) competitors can now step through their code while it is executing on the robot. This will allow competitors to inspect variables, change execution flow, and gain a much deeper understanding of what their robot is doing at that very moment.
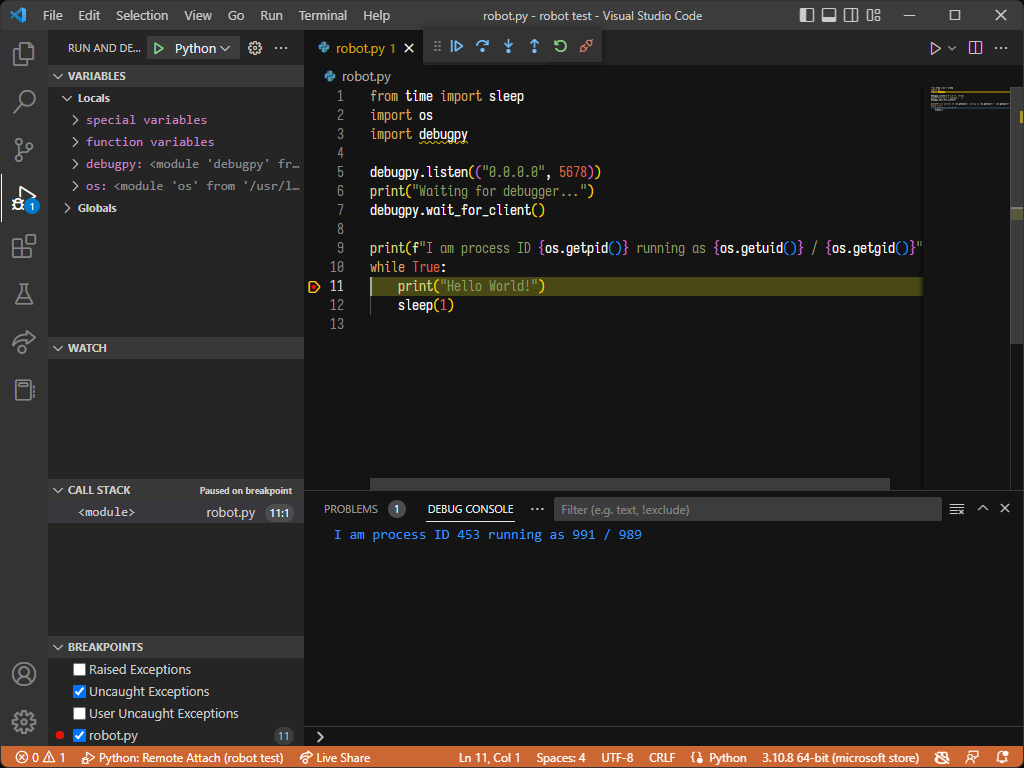
Read the docs to learn more!
Dark Mode
We’re happy to announce that the Student Robotics Web Interface now has a Dark Mode!
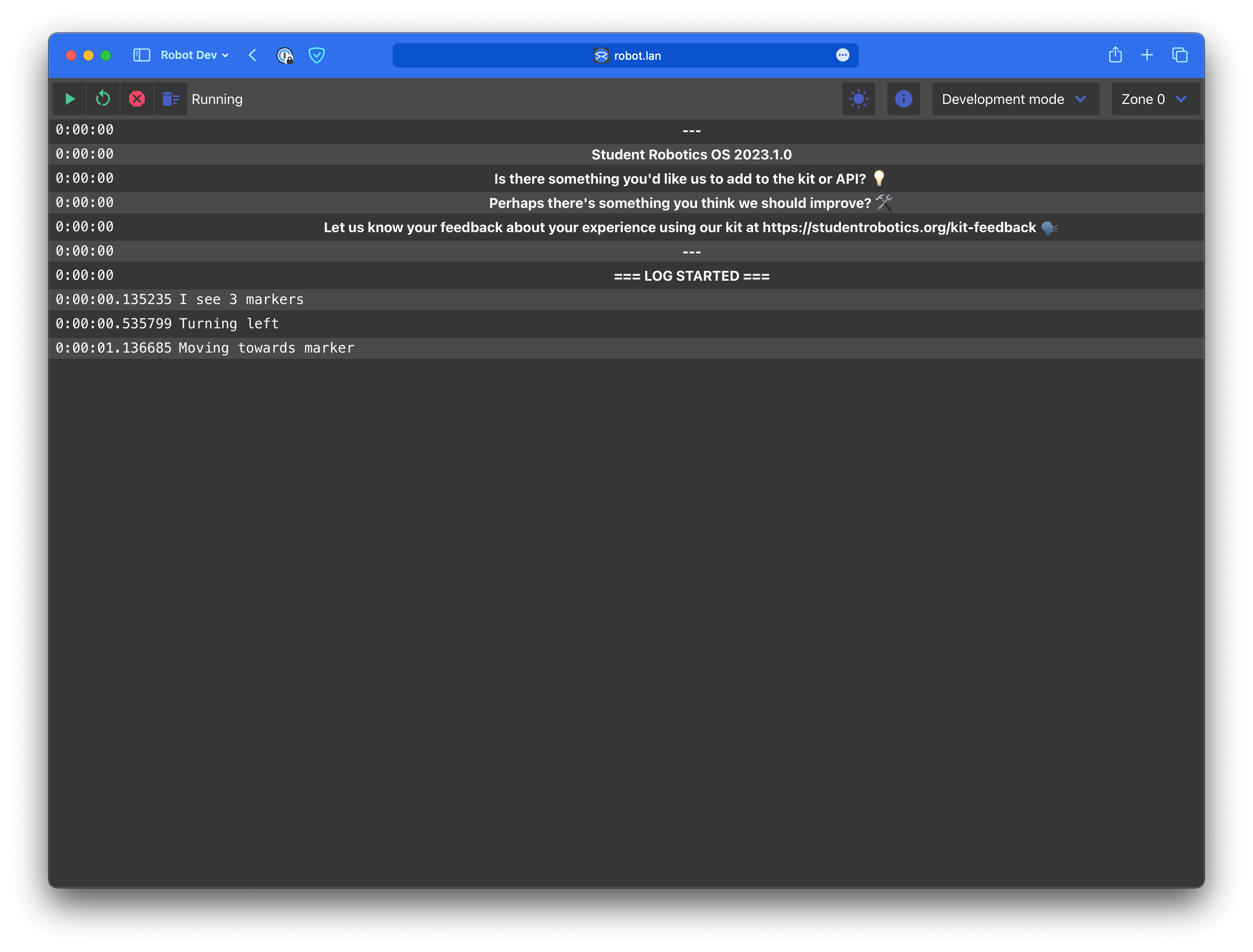
The Web Interface will automatically use the system’s preferred colour scheme, but you can also manually toggle between light and dark mode if you wish.
Improved Vision
We’ve tweaked the calibration of the vision system to make it more accurate. We’ve also added support for processing images through our vision system after the image has been captured, unlocking the ability for teams to develop their own image processing pipelines.
Marker Sizes Changed
The last rules update reduced the size of the markers, and we’ve updated the vision system to match. You’ll need to re download the marker images and print them at the new size for vision to work as expected.
Vision Axes Changes
We’ve also made some opt-in changes to the vision axes. These changes are not enabled by default so as not to break existing code, but we recommend that teams update to use the new axes. By passing legacy_camera_axis=False to your Robot constructor you can opt-in to the new axes. These now follow the standard right-handed coordinate system, with the X axis pointing forwards, the Y axis pointing to the left and the Z axis pointing up. Yaw, pitch and roll are also corrected to their expected directions.