Simulator
The simulator is a useful development tool that allows you to become familiar with our API and test out robotics concepts even if you haven’t finished building your robot yet. It could also be used to test out game strategies before applying them in real life, the simulator will be used for a virtual competition part way through the year.
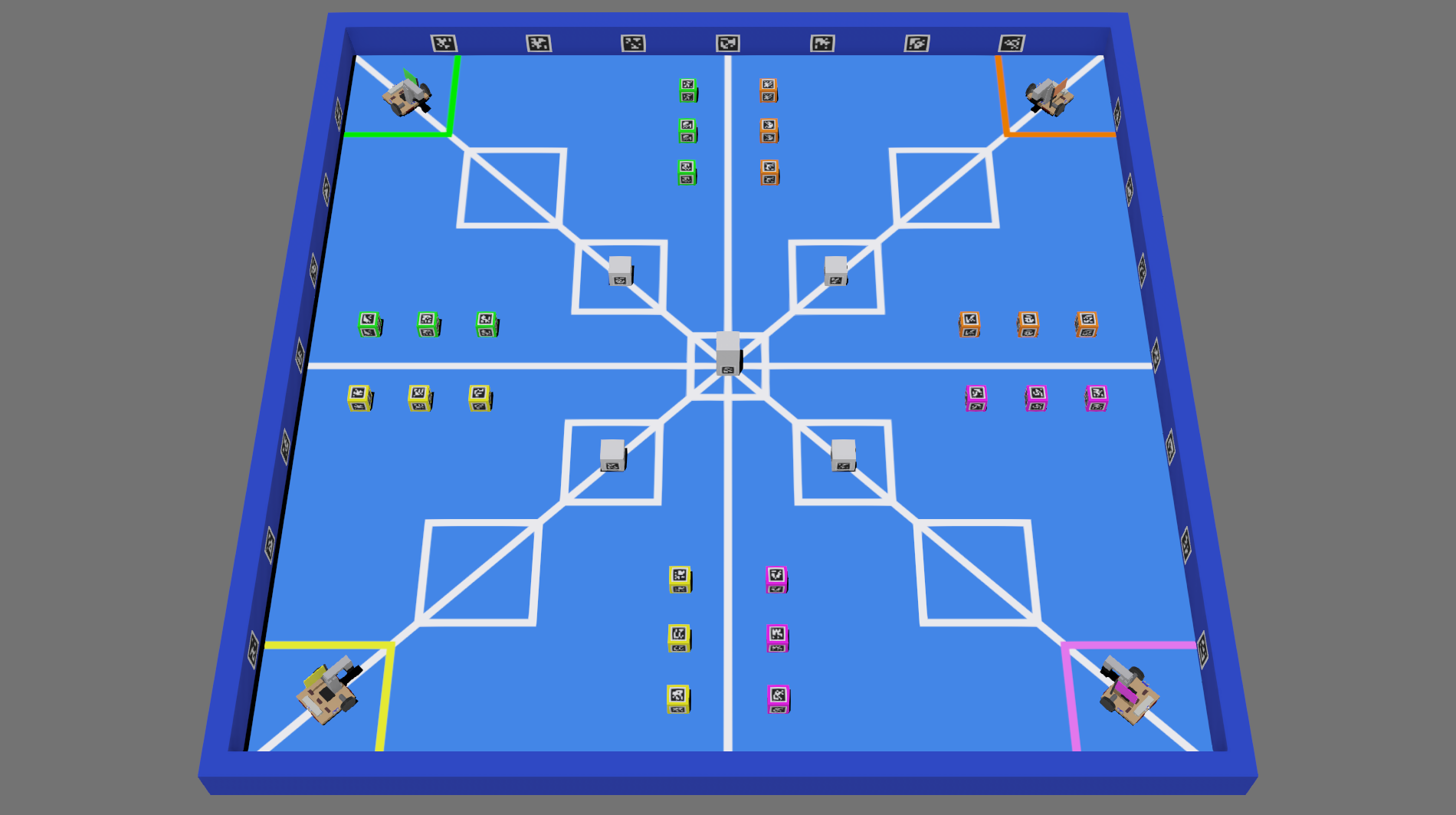
The simulator is built around the Webots platform, which runs the simulation. You control the virtual robot using the Robot API, just like on the physical robots.
Setup
To use the simulator, you will need to install the simulator software and download our simulation environment. This is detailed in the Setting up the Simulator section.
Once you’re set up, the Using the Simulator section provides details on how to use the simulator software and get started on developing the code for your simulated robot.
Just as for programming your robot, we recommend that you use a code editor. A good code editor can provide you with features such as auto completion and syntax highlighting which will help you more easily write code. For suggestions of suitable editors, and how to set them up see the Code Editors section.
The Robot
The simulator contains a pre-built robot, constructed around a set of simulated kit components. The connected boards and sensors are covered in the Simulated Robot section.