Game Assessment Criteria¶
1. Low barrier to entry¶
The kit that we distribute is a lever with which we lower the barrier.
2. Target shape of performance versus payoff function¶
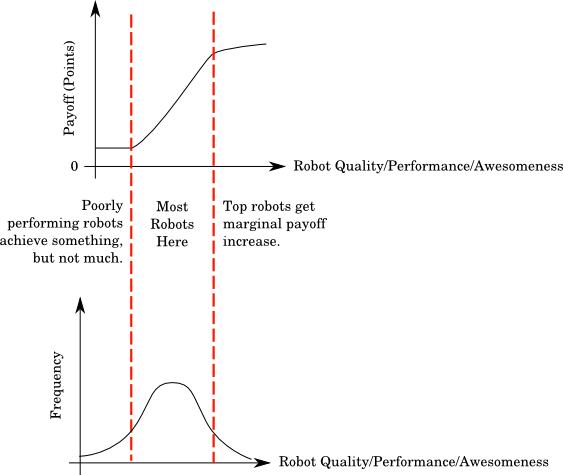
We can create three loose categories of robots:
- Poor: We want these to still be able to score a few points, but not really achieve much beyond that.
- Good: The game should aim to spread these robots out in points-space as much as possible.
- Excellent: Matches between the awesome robots should be as close as possible. This makes the competition exciting, as it should lead to a close final.
3. Axes of exploration¶
There are three general engineering disciplines we want to provide as axes of exploration:
- Software
- Mechanics
- Electronics
The scope for development within these axes should be well-balanced. A team should not have to extensively explore all of these axes to compete.
4. Engineering goals should be encouraged¶
- Robot 'intelligence' and strategy.
- State. Robots that are more than just reflexive are more interesting.
- Reliability. Robots should not fall apart, software should not fall apart.
- Technical 'insanity'. Things that are technically advanced are awesome.
5. Games should be a spectacle¶
- Fun to watch.
- Fun to play.
- No conclusion: must be very unlikely to end before time is up, or result in stalemates.
- Continuous action: camping/sitting must not be encouraged.
6. Game must be a non-contact sport¶
Pushing, breaking, beating, etc. of other robots must not be encouraged.
7. Encourage competitive interaction¶
The behaviour of a robot should be influenced by that of others.
8. Encourage intent¶
Robots acting randomly (eg just doing random walks) should be discouraged.
9. Reproducible in schools¶
The game must be reproducible in schools without too much hassle.
10. Present a range of strategy options¶
There should be different paths available to victory. However:
- These paths should not be completely orthogonal from each other.
- The tasks should interact.
- No single route should be superior to others.
Attribution¶
This page is based on work done by Rob Gilton, originally published at https://studentrobotics.org/trac/wiki/Game%20Assessment%20Criteria.